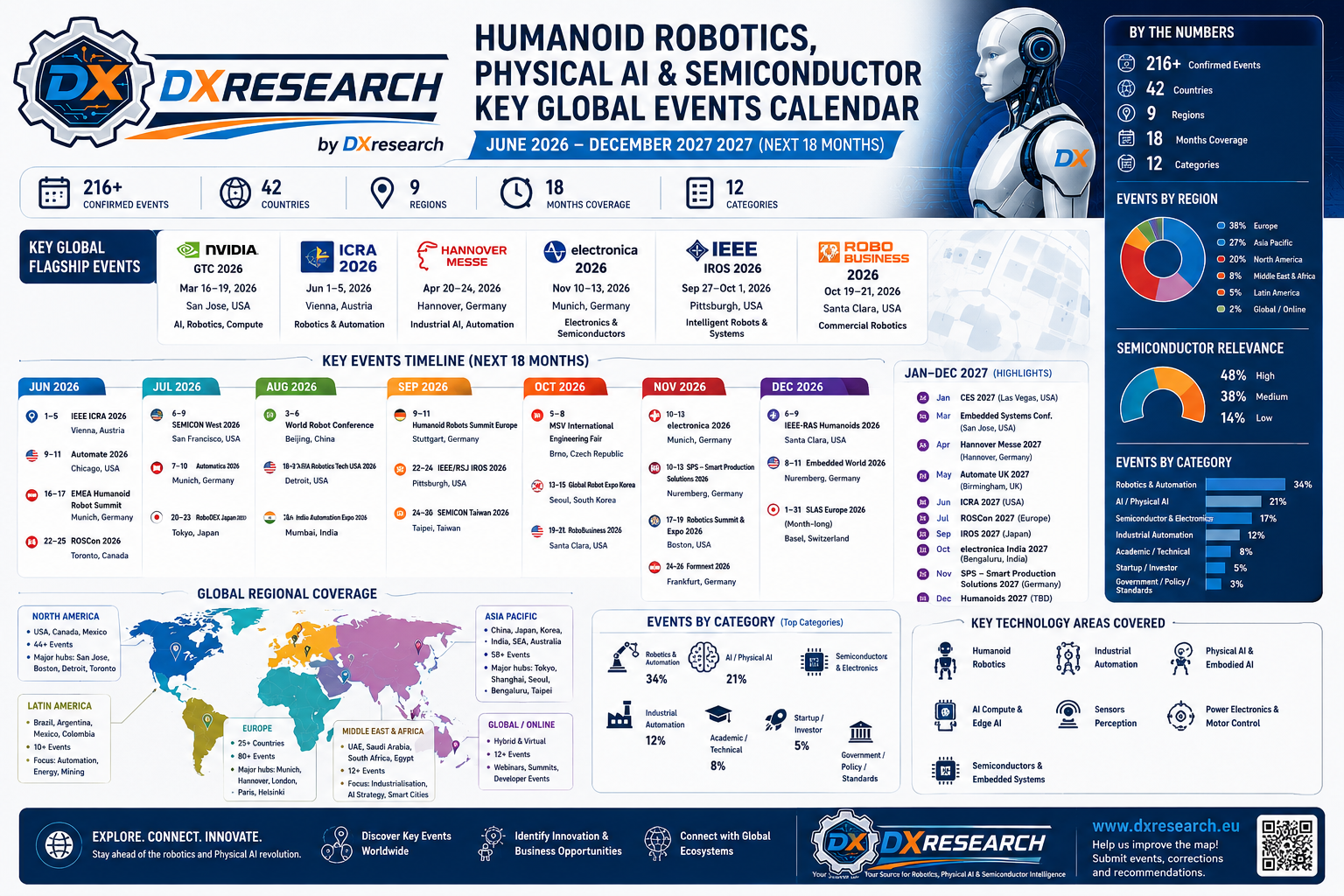
The global humanoid robotics and Physical AI ecosystem is accelerating fast — but the event landscape is fragmented across regions, industries and technologies. Explore the event overview, discover key hubs, and help improve the ecosystem map with additional events, corrections and recommendations –> http://www.dxresearch.eu/roboevents.html We mapped 200+ global events covering humanoids, robotics, AI, semiconductors, automation,…