Modular architectures
Humanoid robotics is scaling through platforms and semiconductor-defined building blocks 🚀
The path to scalable humanoids points toward modular architectures, where standardized semiconductor building blocks enable flexibility, cost efficiency, and ecosystem growth across diverse applications.
Humanoid robotics is entering a phase where ambition meets industrial reality. Early prototypes demonstrate impressive dexterity and mobility. Yet scaling beyond pilots requires a shift in thinking. The conversation is moving from individual robots toward platform architectures that can serve multiple applications with shared foundations.
This transition echoes patterns seen in automotive and industrial automation. The core question becomes clear. How can a humanoid adapt to warehouse picking, healthcare assistance, and industrial inspection without redesigning the entire system each time.
🔹 Application perspective: diversity drives modularity
Use cases define system requirements. A warehouse humanoid prioritizes payload and endurance. A healthcare assistant requires safe interaction and refined manipulation. Inspection robots emphasize perception and autonomy.
This variability leads to differentiated hardware configurations. Grippers range from simple two-finger designs to highly articulated five-finger hands. Sensor stacks evolve from basic vision to multi-modal perception. Payload and agility targets reshape actuator design.
Industry observations confirm this divergence. Robotics adoption continues to expand across sectors with distinct requirements, reinforcing the need for adaptable platforms (https://ifr.org/ifr-press-releases/news/robot-sales-rise-again).
🔹 System perspective: layered architecture emerges
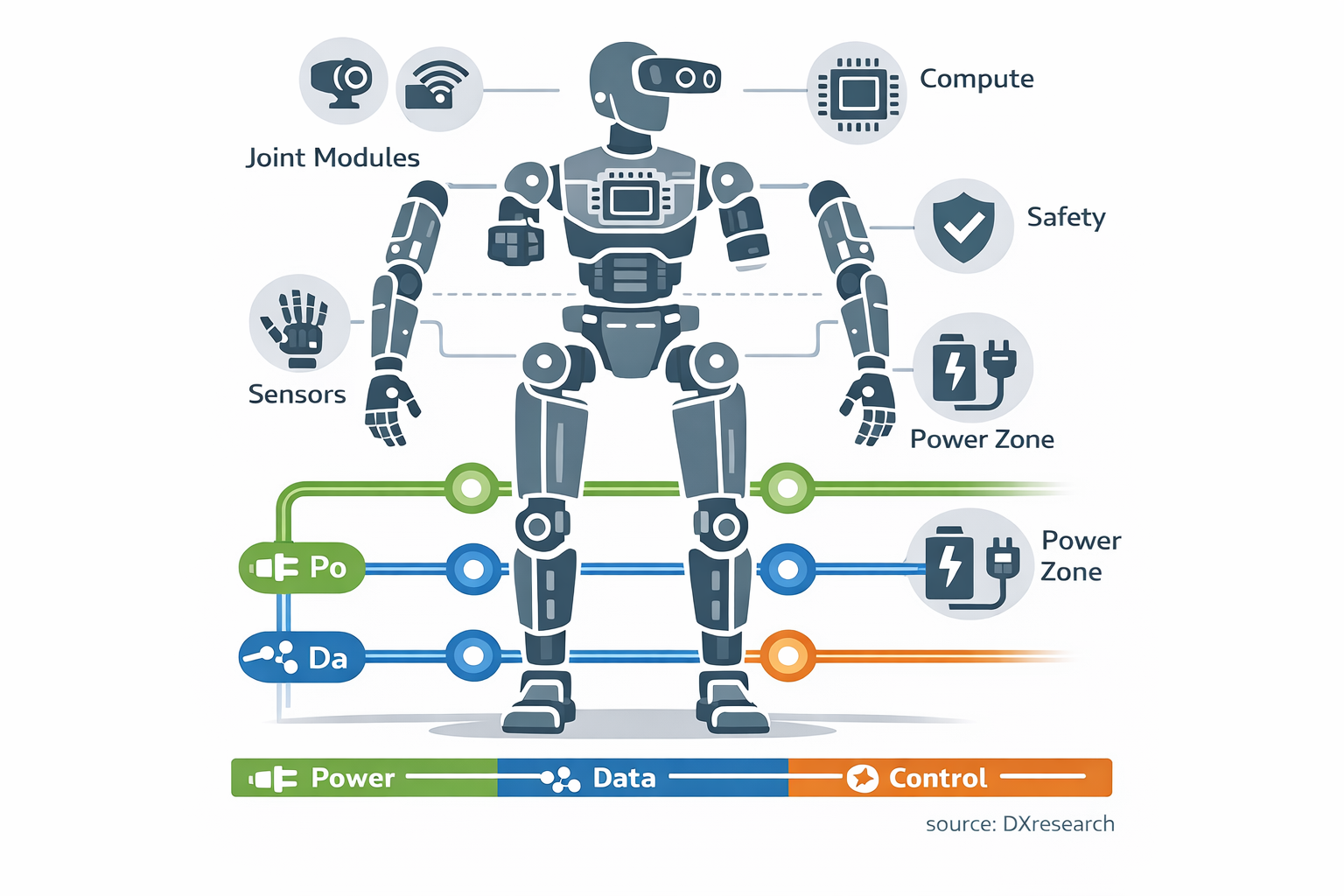
A structured architecture is becoming visible across leading humanoid developments. It separates system layers based on timing, safety, and function.
At the foundation, joint modules execute real-time motion control. These modules integrate motor control, sensing, and power electronics. Above this, deterministic communication networks synchronize motion across the body. Technologies such as EtherCAT illustrate how real-time industrial communication supports coordinated systems (https://www.ethercat.org).
Parallel to motion control, perception systems process high-bandwidth sensor data. Middleware frameworks such as ROS 2 enable distributed software architectures with scalable communication models (https://docs.ros.org/en/iron/Installation/DDS-Implementations.html).
At the top, centralized compute platforms handle planning, AI inference, and task orchestration. This layered separation allows each domain to evolve at its own pace.
🔹 Semiconductor perspective: enabling modular ecosystems
Semiconductors sit at the core of this transformation. Each architectural layer depends on specialized silicon capabilities.
Joint modules rely on motor control MCUs, gate drivers, and power devices. Power distribution depends on efficient conversion, protection, and monitoring components. Perception requires sensor interfaces and processing acceleration. Central compute integrates CPUs, GPUs, and AI accelerators.
The strategic opportunity lies in defining standardized semiconductor building blocks. Reference designs for joint controllers, power zones, and sensor hubs can reduce system complexity and accelerate development cycles.
Automotive experience highlights the value of such approaches. Platform-based E/E architectures improve scalability and cost efficiency across vehicle variants (https://www.mckinsey.com/industries/automotive-and-assembly/our-insights/rethinking-car-software-and-electrical-electronic-architecture).
🔹 Ecosystem perspective: interfaces shape the market
As modularity increases, interfaces become critical. Mechanical, electrical, and data interfaces define how components interact.
Industrial history shows that consistent interfaces accelerate ecosystem growth. EtherCAT provides an example of how standardized communication enables multi-vendor interoperability (https://www.ethercat.org).
In humanoid robotics, similar dynamics are emerging. Standardized joint modules, power interfaces, and communication layers could enable a broader supplier base. This would support faster innovation and lower system costs.
Middleware also plays a role. ROS 2 supports distributed development and integration across hardware platforms, encouraging reuse and collaboration (https://docs.ros.org/en/iron/Installation/DDS-Implementations.html).
🔹 Economic perspective: scale requires reuse
Cost remains a central barrier to widespread humanoid adoption. Current systems often rely on highly customized designs, limiting economies of scale.
A platform approach enables component reuse across multiple applications. Joint modules, power systems, and compute platforms can be deployed in different humanoid configurations with minimal redesign.
This mirrors trends in other industries. Platform strategies allow manufacturers to amortize development costs across product families. The same principle applies to robotics, where shared architectures can accelerate commercialization.
🔹 Risk perspective: balancing flexibility and performance
Modularity introduces trade-offs. Standardized components may limit optimization for specific applications. System integration becomes more complex as interfaces must be strictly defined and validated.
There is also timing risk. Premature standardization can constrain innovation in a rapidly evolving field. At the same time, delayed standardization can slow ecosystem development and increase costs.
The balance lies in defining stable layers. Power, safety, and communication can benefit from early standardization. Application-specific elements such as end-effectors and AI models can remain flexible.
🔹 Strategic outlook: platforms define long-term value
The evolution toward modular humanoid architectures shifts the competitive landscape. Value increasingly concentrates in the definition of building blocks and interfaces.
Companies that establish widely adopted semiconductor reference designs can influence system architectures across the ecosystem. This creates leverage beyond individual components.
The trajectory suggests a future where humanoids are assembled from interoperable modules. The visible robot becomes the integration of standardized subsystems, each optimized for scalability and reuse.
🔹 Conclusion
Humanoid robotics is progressing toward a platform-driven model shaped by modular design and semiconductor integration. This approach aligns technical flexibility with economic scalability. It supports diverse applications while enabling reuse across systems.
The industry is still in an early phase. Architectural decisions made today will influence long-term ecosystem dynamics. The focus on building blocks and interfaces provides a foundation for sustainable growth.
⸻
🔗 Sources
World Robotics Report 2024 – IFR
2024
Global robot adoption trends across industries highlight growing demand and diverse application requirements driving modular system design.
https://ifr.org/ifr-press-releases/news/robot-sales-rise-again
Rethinking automotive E/E architecture – McKinsey
2023
Explains platform-based electrical architectures and their role in scalability, cost reduction, and modular system design.
https://www.mckinsey.com/industries/automotive-and-assembly/our-insights/rethinking-car-software-and-electrical-electronic-architecture
ROS 2 DDS Implementations
2024
Describes middleware architecture enabling distributed robotics systems and modular communication frameworks across hardware platforms.
https://docs.ros.org/en/iron/Installation/DDS-Implementations.html
EtherCAT Technology Overview
2024
Industrial Ethernet standard supporting deterministic communication and multi-vendor interoperability in automation systems.
https://www.ethercat.org
IEEE Spectrum Robotics Insights
2024
Covers emerging humanoid robotics trends and system architectures shaping the next generation of robots.
https://spectrum.ieee.org/robotics
⸻
#humanoid #robotics #physicalAI #semiconductor #infineon #automation #systemsengineering