Torque Sensing as a Control and Safety Primitive in Physical-AI Robotics
Torque sensing has transitioned from a niche capability to a foundational system primitive for physical-AI robots operating in unstructured, contact-rich environments. By exposing interaction forces directly at the joint or actuator level, torque sensing enables safer manipulation, more stable locomotion, improved disturbance rejection, and learning policies that generalize better outside controlled settings. Compared with position-dominant architectures, torque-aware systems regulate interaction energy rather than merely reacting to kinematic error. These benefits, however, come with real costs: actuator complexity, calibration burden, thermal sensitivity, and increased integration risk. This white paper examines why torque sensing became a value driver, how it is implemented in practice, how classical and torque-controlled architectures differ, where trade-offs lie, and which innovation paths are likely to matter over the next decade.
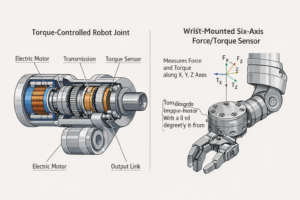
Force torque sensors can be classified as follows:
-
6-axis force torque sensors (Fx, Fy, Fz, Tx, Ty, Tz): Measure all types of forces and torques acting on a specific point.
-
3-axis force sensors (Fx, Fy, Fz): Measure forces in three axes only.
-
1-axis pressure sensors: Measure pressure along a single axis.
-
Torque sensors: Measure rotational forces along a single axis.

source: https://www.researchgate.net/profile/Isiah-Zaplana/publication/322070706/figure/fig6/AS:631630217633803@1527603787186
Why Torque Sensing Became a Value Driver
Early industrial and service robots extracted value through precision and repeatability in structured environments. Position and velocity control, sometimes augmented with impedance or admittance layers, assumed that interaction forces were either negligible or predictable. This assumption collapses in physical-AI deployments where robots encounter unknown object stiffness, intermittent contact, human interaction, and terrain uncertainty. In these regimes, force is not an exception but a dominant signal.
Torque sensing creates value by exposing interaction forces before they manifest as large position error, instability, or saturation. Instead of inferring contact indirectly through motor current spikes or kinematic deviation, the system measures or estimates torque explicitly and early. This allows controllers to regulate interaction energy directly, improving safety margins, contact fidelity, and recovery from disturbances. For learning systems, torque provides a more physically grounded observation than position error, reducing the burden on policies to implicitly infer contact dynamics.
Limits of Classical Position and Impedance Control
Classical impedance control improves behavior by shaping apparent joint stiffness and damping, but the force loop remains implicit. Torque exists only as an internal variable inside the motor drive, distorted by gearbox friction, efficiency variation, backlash, and temperature effects. As a result, contact estimation is slow and condition-dependent. Well-tuned systems behave acceptably in narrow envelopes but degrade unpredictably as payloads, wear, or thermal state change.
The architectural limitation is structural: force is tolerated rather than regulated. Contact is detected only after the system state has already shifted. This limits how early disturbances can be rejected, how cleanly force information can be exposed to higher-level planners, and how reliably safety logic can operate across long deployments.
Torque-Controlled Architectures and Sensing Mechanisms
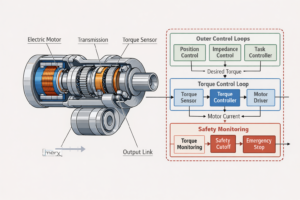
Torque-controlled architectures move the primary inner loop from position or velocity to torque. The inner loop regulates torque directly at the actuator or joint, typically at several hundred hertz or higher, while position, impedance, and task-space controllers operate as outer loops that command desired torque. This architecture requires explicit torque observability.
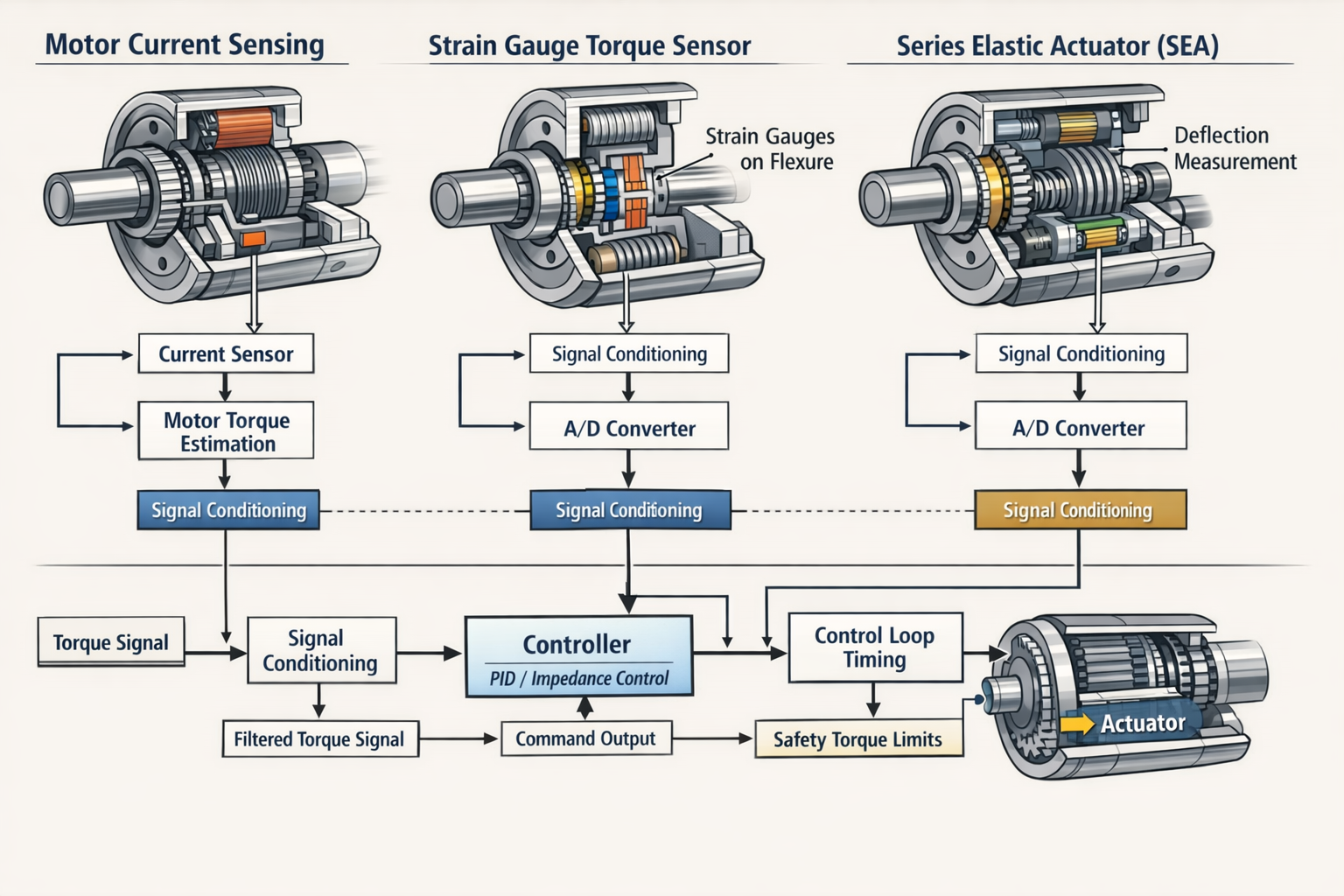
Torque can be obtained through several mechanisms, each with distinct system implications:
- Motor current estimation, using known torque constants, is simple and low cost but highly sensitive to friction, efficiency variation, and temperature.
- Inline torque sensors, placed in the load path, provide direct measurement but add mechanical interfaces, wiring complexity, and cost.
- Strain-based joint sensing, where strain gauges are integrated into joint structures or transmissions, preserves compactness but requires careful mechanical design and calibration.
- Series elastic actuators (SEAs) introduce intentional compliance, dramatically improving force resolution and shock tolerance at the cost of stiffness and bandwidth.
The key insight is that torque sensing is not a component choice but a control philosophy decision. It shifts complexity across mechanics, electronics, software, and lifecycle operations.
Comparative Trade-Space of Torque Sensing Methods
The table below provides a qualitative heat-map comparison intended for architectural decision-making rather than component selection.
| Method | Resolution | Bandwidth | Thermal Sensitivity | Robustness | Integration Complexity | Cost Impact | Typical Use |
|---|---|---|---|---|---|---|---|
| Motor current estimation | Low–Medium | High | High | High | Low | Very Low | Cost-sensitive joints |
| Inline torque sensor | High | Medium | Medium | Medium | High | High | Precision wrists, grippers |
| Strain-based joint sensing | High | Medium–High | Medium | Medium–High | High | Medium–High | Compact humanoid joints |
| Series elastic actuator | Very High | Low–Medium | Low | Very High | Very High | High | HRI, learning-heavy systems |
| Hybrid (selective sensing) | Mixed | Mixed | Mixed | Mixed | Medium | Medium | Commercial platforms |
No approach dominates. Successful systems align sensing fidelity with task-critical interaction points rather than applying uniform solutions across all joints.
Control and Learning Implications
With torque sensing, force becomes an explicit state rather than a side effect. In classical control, this improves disturbance rejection, reduces oscillations during contact, and stabilizes behavior across payloads and environments. For learning systems, torque signals often provide cleaner and more transferable information than position error, particularly for contact-rich manipulation and locomotion.
Policies trained with torque-aware observations tend to enforce safer action constraints by saturating commanded torque rather than clipping velocities after instability has already developed. Sim-to-real transfer also improves, as simulators generally approximate torque limits and contact impulses more reliably than gearbox friction or unmodeled compliance. The trade-off is integration rigor: torque-controlled stacks require strict loop separation, deterministic timing, and explicit handling of noise, bias drift, and thermal effects to avoid brittle behavior.
Implementation Reality: Signal Chain and Timing
A torque-sensing joint is a measurement and control pipeline. It begins with torque transduction, followed by analog front-end conditioning, synchronized sampling tied to commutation timing, bias and temperature compensation, and time-aligned fusion with position and velocity signals. Where torque enters the stack defines system behavior. If torque closes the inner loop, latency and filtering must be minimal. If torque is delayed or over-filtered, the joint behaves like a poorly tuned impedance system despite architectural intent.
Calibration, Drift, and Safety Boundaries
Calibration is the dominant hidden cost. Torque sensors drift due to temperature, aging, and mechanical stress. Static factory calibration is insufficient for long deployments. Fielded systems require in-situ bias estimation, thermal compensation models, and diagnostic tooling that can distinguish real contact from sensor error.
Safety logic must observe torque independently of the control loop, enforcing hard limits at the drive level. Sharing timing or assumptions between safety and performance control creates failure modes that only appear under load. In practice, torque is both a control variable and a safety signal, but never with shared trust boundaries.
Supplier Landscape Overview
The torque sensing ecosystem divides into joint-level torque sensing and end-effector six-axis force/torque sensing. Joint-level solutions are deeply integrated and actuator-centric. End-effector sensors are more standardized and often the fastest way to add force awareness to existing systems.
Torque-Aware Actuators and Integrated Joint Modules
These suppliers deliver actuators where torque sensing and torque control are integral to the joint, not an add-on. They are relevant when torque is a first-class inner-loop variable.
| Company | Representative Product / Family | Architecture Role | Sourcing Notes | Full URL |
|---|---|---|---|---|
| Sensodrive | SensoJoint | Fully integrated torque-controlled joint | Mature torque-first philosophy; strong in research and low-volume production. Integration effort is front-loaded but control quality is high. Limited scalability without custom agreements. | https://www.sensodrive.de/products/torque-technology-senso-joint.php |
| Harmonic Drive SE | Torque-sensing strain wave gear solutions | Transmission-centric torque observability | Attractive when gearbox choice is fixed early. Torque sensing is secondary to transmission performance. Calibration and thermal behavior require system-level validation. | https://harmonicdrive.de/en/home |
| Moog | Custom servo actuators with torque sensing | High-end custom actuation | Suitable for aerospace-grade or safety-critical robots. Cost, lead time, and customization overhead are significant. Best for low-volume, high-performance systems. | https://www.moog.com |
| Maxon | Torque-controlled motor + drive stacks | Motor-drive-level torque control | Torque sensing often inferred or external. Strong ecosystem and documentation, but true joint-level torque sensing must be engineered by the integrator. | https://www.maxongroup.com |
Architectural note:
Integrated torque actuators reduce control ambiguity but lock in mechanical and electrical interfaces early. They are best chosen before kinematic and packaging decisions are finalized.
Joint-Level Torque Sensors (Inline or Structure-Integrated)
These components are used when the actuator is custom-designed but explicit torque measurement is required.
| Company | Product Type | Typical Placement | Sourcing Notes | Full URL |
|---|---|---|---|---|
| FUTEK | Rotary and reaction torque sensors | Inline with joint output | Broad OEM support and customization. Mechanical integration effort is non-trivial. Drift and overload behavior must be tested under real joint loads. | https://www.futek.com/applications/torque-sensors-for-robot-joint-control |
| HBK | OEM/custom torque transducers | Inline or embedded | Industrial-grade sensing with strong metrology background. Best suited for custom actuator programs with in-house calibration capability. | https://www.hbkworld.com/en/products/transducers/oem-custom-sensors/torque |
| TE Connectivity | Safety torque sensor concepts | Joint-level safety monitoring | Focused on safety-rated sensing. Often complements, rather than replaces, performance torque sensing in collaborative systems. | https://www.te.com |
Integration note:
Joint-level sensors add mechanical interfaces that influence stiffness, backlash, and failure modes. They should be evaluated as structural elements, not just sensors.
End-Effector Six-Axis Force/Torque Sensors
These sensors do not enable torque control at the joint but provide critical contact observability for manipulation, insertion, and tool use.
| Company | Representative Product | Typical Use | Sourcing Notes | Full URL |
|---|---|---|---|---|
| ATI Industrial Automation | Omega / Theta series | High-fidelity wrist F/T sensing | Considered a reference standard in research and industry. Excellent signal quality, higher cost, robust overload behavior. | https://ati.novanta.com/products/force-torque-sensors/ |
| Robotiq | FT 300 / FT 300-S | Rapid deployment force sensing | Strong ecosystem integration. Less flexible mechanically, but low integration friction for commercial robots. | https://robotiq.com/products/ft-300-force-torque-sensor |
| OnRobot | HEX 6-axis sensor | Cobot-centric applications | Designed for ease of use rather than deep customization. Suitable when time-to-deploy dominates performance tuning. | https://onrobot.com/en/products/hex-6-axis-force-torque-sensor |
| Bota Systems | SensONE | Compact, low-latency F/T | Attractive for space-constrained wrists and learning-heavy stacks. Interface and filtering options require careful configuration. | https://www.botasys.com/force-torque-sensors/sensone |
| SCHUNK | FTS series | Industrial manipulation | Industrial robustness focus. Often paired with SCHUNK tooling ecosystems. | https://schunk.com |
System note:
Wrist F/T sensors complement but do not replace joint torque sensing. They observe external contact, not internal joint dynamics.
Sourcing Strategy Patterns Observed in Practice
Across commercial and advanced research systems, several sourcing patterns repeat:
- Hybrid sensing architectures dominate
High-fidelity torque sensing is reserved for joints with frequent or safety-critical contact, while other joints rely on current estimation. - Calibration cost scales faster than BOM cost
The operational cost of maintaining torque accuracy often exceeds the component cost over the robot lifetime. - Integrated actuators reduce engineering risk but limit flexibility
Custom actuator stacks allow optimization but require deep mechatronics expertise and longer validation cycles. - End-effector F/T sensors are often the first step
Teams frequently add wrist sensing before committing to full torque-controlled joints.
Operational and Lifecycle Implications
Torque sensing improves interaction quality but increases operational burden. Drift accumulates slowly and invisibly, demanding recalibration procedures and monitoring infrastructure. Safety certification becomes more complex because torque becomes safety-relevant. Cost scaling is non-linear: high-quality torque sensing does not scale cleanly with joint count. Commercially viable systems concentrate sensing where uncertainty is highest and accept reduced observability elsewhere.
Outlook for Further Innovation
Near-term innovation will focus less on new sensing physics and more on integration and automation. Embedded torque sensing within transmissions and joint housings will reduce part count and calibration effort. Self-calibrating joints that estimate bias during normal operation will be critical for fleet-scale deployment.
On the software side, torque will increasingly be treated as a learning-native signal. Policies that reason explicitly about torque limits and interaction energy already show improved stability and safer exploration. Structural limits remain: high-bandwidth, high-stiffness torque control is incompatible with low-cost transmissions and extreme miniaturization. Torque sensing will remain a selective, value-weighted investment rather than a universal feature.
Glossary
Torque sensing
Measurement or estimation of rotational force at a joint or actuator.
Torque control
Control architecture where torque is the primary regulated variable in the inner loop.
Impedance control
Control strategy shaping the force–motion relationship without explicit force regulation.
Series Elastic Actuator
Actuator inserting intentional compliance to improve force resolution and shock tolerance.
Loop separation
Design principle enforcing distinct bandwidths between inner and outer control loops.
Bias drift
Slow change in sensor zero offset over time due to temperature or aging.
Sources and References
Hogan, N. “Impedance Control: An Approach to Manipulation.” ASME Journal of Dynamic Systems, Measurement, and Control.
https://asmedigitalcollection.asme.org/dynamicsystems/article/107/1/1/408001
Accessed: 2026-01-30
Pratt, G., Williamson, M. “Series Elastic Actuators.” IEEE/RSJ IROS.
https://ieeexplore.ieee.org/document/724230
Accessed: 2026-01-30
De Luca, A., Albu-Schäffer, A. “Sensing and Control for Physical Human–Robot Interaction.” Springer Handbook of Robotics.
https://link.springer.com/chapter/10.1007/978-3-319-32552-1_42
Accessed: 2026-01-30