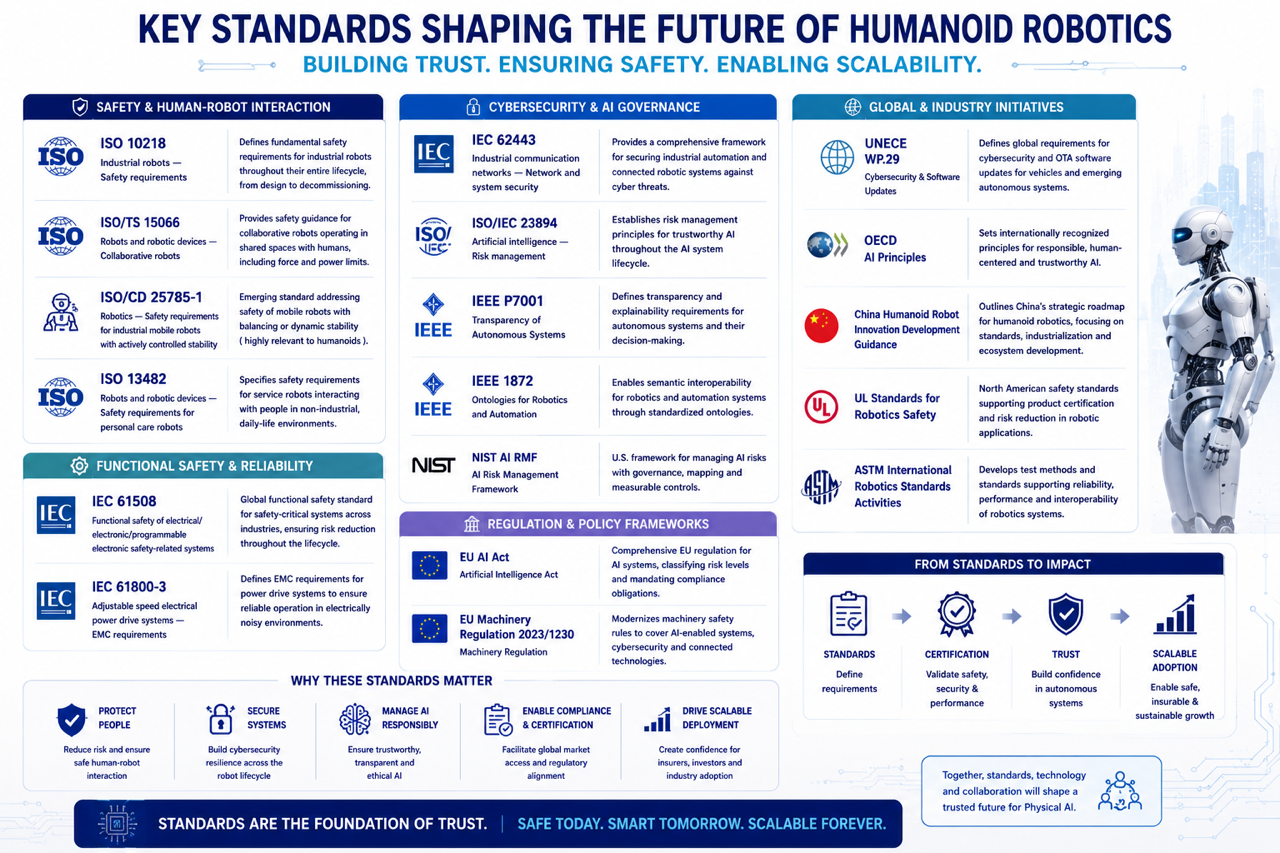
Humanoid robotics is entering the same industrialization phase once seen in automotive and aviation: innovation alone is no longer enough. Standards such as ISO 10218, ISO/TS 15066, IEC 61508, IEC 62443 and emerging humanoid-focused frameworks will define how Physical AI becomes scalable, certifiable and insurable. The next competitive advantage is trusted deployment. That is where…