What Is Physical AI?
Physical AI refers to embodied systems that sense, decide, and act in the real world using a combination of learning-based intelligence and deterministic physical control. It is not defined by a specific algorithm or model class, but by a system property: intelligence that is inseparable from physics, timing, energy, and safety constraints. Physical AI systems must operate under uncertainty while respecting real-time deadlines and bounded failure behavior. This chapter establishes a precise definition of Physical AI, clarifies what it includes and excludes, and explains why Physical AI is fundamentally a systems engineering problem rather than an AI model problem.
The term “Physical AI” is widely used but inconsistently defined. In practice, it has been applied to everything from simulation-trained policies to humanoid demonstrations and warehouse robots. This ambiguity creates confusion at architectural, organizational, and regulatory levels. The purpose of this chapter is to define Physical AI in a way that is operationally useful. The definition must support system design decisions, safety arguments, and lifecycle planning. A vague or aspirational definition is insufficient; Physical AI must be defined in terms of observable system properties and constraints.
A Precise Definition of Physical AI
Physical AI is an embodied system that integrates learning-based perception or decision-making into a closed-loop interaction with the physical world, subject to real-time, safety, energy, and reliability constraints. The intelligence of the system cannot be meaningfully separated from its embodiment. Sensor placement, actuator dynamics, compute latency, and mechanical limits directly shape what the system can learn and how it behaves. Physical AI is therefore not an AI model deployed onto a robot, but a co-designed system where intelligence and hardware are interdependent.
What Physical AI Is Not
Clarity requires explicit exclusions. Physical AI is not equivalent to artificial intelligence applied near a physical process. Vision systems used purely for inspection, cloud-based planners that do not close real-time loops, or teleoperated machines with minimal autonomy do not meet the definition. Similarly, fixed automation operating in fully constrained environments may use advanced algorithms without being Physical AI. The defining criterion is not algorithmic sophistication, but whether learned intelligence participates directly in real-time physical decision-making under uncertainty.
Embodiment as a First-Order Constraint
In Physical AI, embodiment is not a deployment detail; it is a design variable. Mass, inertia, compliance, sensor noise, actuator bandwidth, and energy storage define the feasible behavior space. Learning systems must operate within these limits, and their performance is shaped by them. A learned policy that ignores actuator saturation or latency is not incomplete; it is invalid. Physical AI therefore forces tighter coupling between mechanical design, electronics, and software than classical robotics or disembodied AI systems.
Intelligence Under Real-Time and Safety Constraints
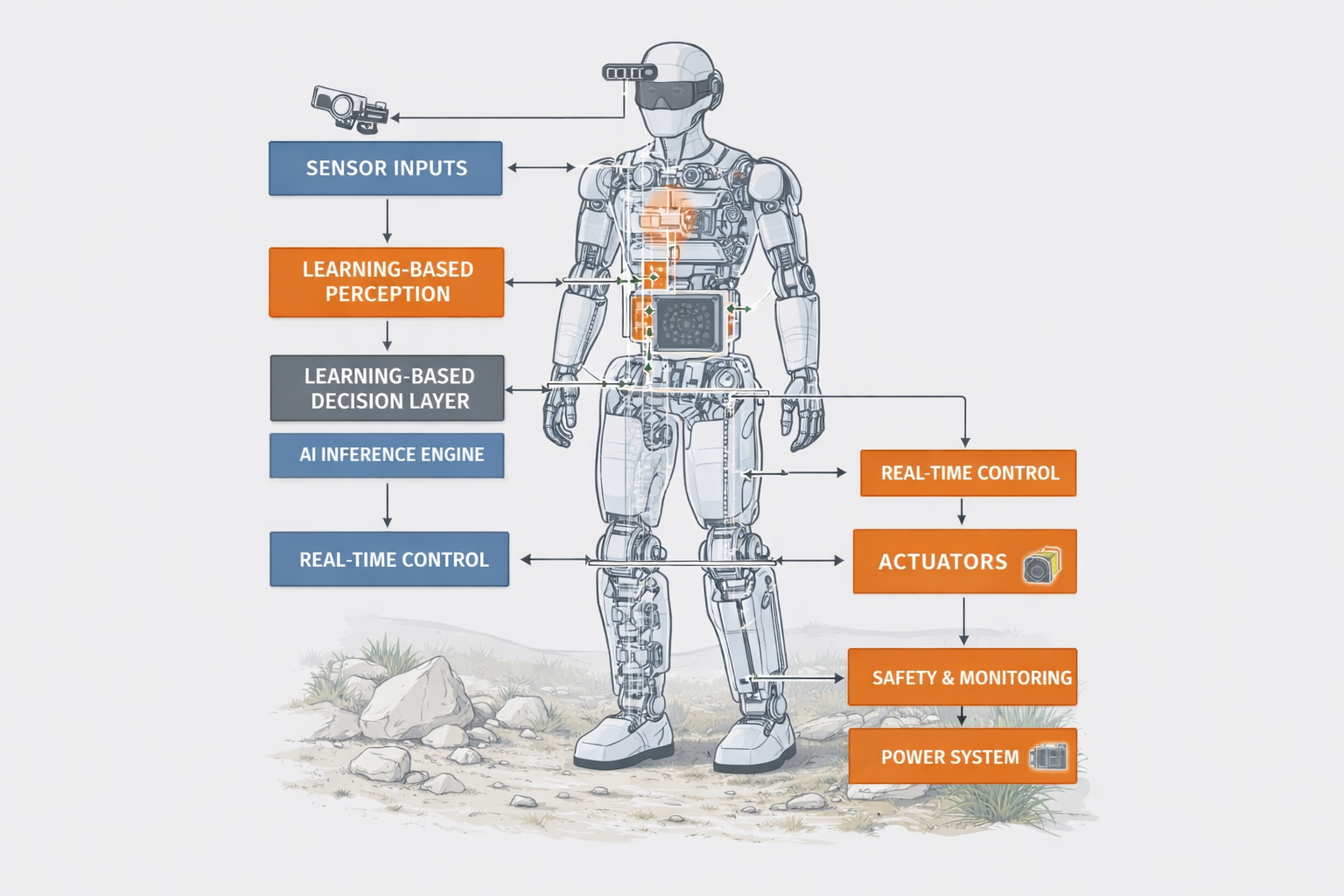
Physical AI systems must make decisions fast enough to matter. Control loops operate on millisecond timescales, while perception and planning often run orders of magnitude slower. This mismatch necessitates architectural separation between intelligence layers and execution layers. Learned components may provide high-level intent or interpretation, but low-level control must remain deterministic and bounded. Safety mechanisms must override or constrain learned outputs. This layering is not optional; it is what allows Physical AI systems to be certifiable and insurable.
Learning as a System Component, Not a Feature
In Physical AI, learning is not an add-on capability but a system component with explicit interfaces, failure modes, and lifecycle costs. Learned models require data curation, versioning, validation, and update strategies. Their behavior changes over time as environments shift or models are retrained. This introduces organizational and technical requirements that extend beyond traditional robotics teams. Treating learning as a feature rather than a subsystem leads to fragile systems and unmanageable risk.
Implications for Real-World Deployment
Deploying Physical AI systems requires evidence that adaptive behavior remains bounded across operating conditions. This shifts emphasis from static certification toward continuous validation and monitoring. Update mechanisms must be secure and reversible. Field data must be governed and auditable. Physical AI systems that lack these capabilities may function technically but fail commercially or regulatorily. Deployment success depends less on raw intelligence and more on disciplined lifecycle management.
Relationship to Adjacent Concepts
Physical AI overlaps with but is distinct from autonomy, cyber-physical systems, and robotics. Autonomy describes the degree of independent operation, not how intelligence is implemented. Cyber-physical systems emphasize integration of computation and physical processes but do not require learning. Robotics is the broader field of embodied machines, within which Physical AI represents a specific system paradigm. These distinctions matter because they determine which engineering disciplines and validation methods are required.
Long-Term Definition Stability
A durable definition of Physical AI must survive shifts in algorithms and hardware. As models improve and compute becomes cheaper, the core challenges remain: uncertainty, embodiment, safety, and lifecycle evidence. Physical AI should therefore be understood as a class of systems defined by constraints and responsibilities, not by state-of-the-art techniques. This framing allows the compendium to remain relevant as technologies evolve.
Glossary
Physical AI
Embodied systems that integrate learning-based intelligence into real-time physical interaction under safety and reliability constraints.
Embodiment
The physical instantiation of a system, including mechanics, sensors, actuators, and energy sources, that shapes its behavior.
Real-time constraint
A requirement that computation and action occur within bounded time to maintain system stability or safety.
Lifecycle management
Processes governing deployment, monitoring, updating, and retirement of a system over time.
Bounded behavior
System behavior constrained within predefined physical and safety limits regardless of learned component outputs.
Sources and References
Springer Handbook of Robotics
Bruno Siciliano, Oussama Khatib (eds.)
https://link.springer.com/book/10.1007/978-3-540-30301-5
Accessed: 2026-01-31
Cyber-Physical Systems: Design Challenges
Edward A. Lee
https://ptolemy.berkeley.edu/projects/cps/
Accessed: 2026-01-31
Safe and Reliable Learning in Robotics
IEEE Robotics and Automation Magazine
IEEE
https://ieeexplore.ieee.org/document/8463180
Accessed: 2026-01-31