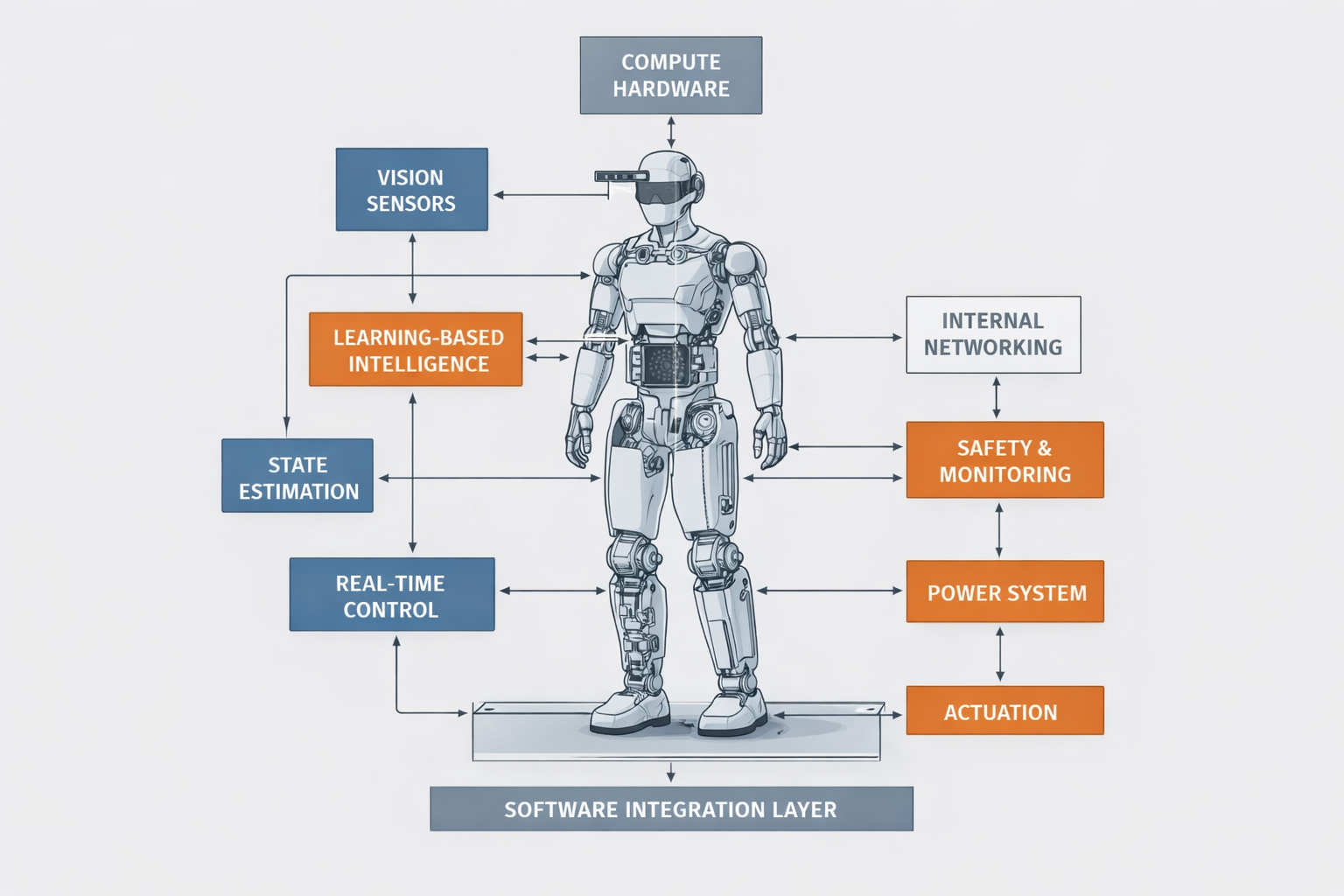
Functional System Blocks of a Physical AI Humanoid
A humanoid Physical AI system is not defined by its shape, but by the tight coupling of perception, intelligence, control, actuation, energy, and safety within a single embodied machine. Unlike task-specific robots, humanoids must integrate all major functional blocks at human scale, under continuous interaction with people and environments not designed for automation. This chapter presents a canonical decomposition of those functional blocks, explaining the role each plays in enabling humanoid capability. The emphasis is not on component catalogs, but on why these blocks exist, how they interact, and where architectural decisions determine feasibility, safety, and long-term deployability.
Perception and Exteroceptive Sensing
Perception allows a humanoid to interpret complex, dynamic human environments without environmental modification. Unlike industrial robots, humanoids cannot rely on fixed fiducials or structured scenes. Vision, depth, audio, and contact sensing are foundational to autonomy, manipulation, navigation, and human interaction.
https://upload.wikimedia.org/wikipedia/commons/7/7f/Humanoid_robot_sensors_diagram.png
{kind=link}
Image prompt (short)
“Engineering schematic of a humanoid robot highlighting cameras, depth sensors, microphones, and tactile sensors, neutral background, labeled subsystems.”
Typical sensing modalities and constraints:
- RGB / stereo / depth cameras: 10–60 Hz, high bandwidth, latency-sensitive
- IMU and force sensors: 500–2000 Hz, low latency, drift-sensitive
- Tactile arrays: sparse but high semantic value for manipulation
Key trade-offs:
- Sensor richness versus power and compute load
- Field-of-view coverage versus occlusion from humanoid geometry
- Calibration stability over temperature and mechanical stress
State Estimation and Proprioception
Humanoids are inherently unstable systems with many degrees of freedom. Accurate estimation of joint states, contact conditions, and body pose is essential for balance, locomotion, and safe interaction. This block translates raw sensor data into a coherent internal representation of the robot’s own body.
https://upload.wikimedia.org/wikipedia/commons/3/3a/Humanoid_robot_kinematic_chain.png
{kind=link}
Image prompt (short)
“Humanoid kinematic chain diagram showing joint states, center of mass, and contact points, engineering illustration style.”
Key estimation elements:
- Joint position and velocity sensing
- Whole-body state estimation (base pose, COM)
- Contact detection and force estimation
Design constraints:
- Update rates typically 500–1000 Hz
- Tight coupling to control loops
- Sensitivity to encoder drift and compliance
Failure sensitivity:
- Small estimation errors can cause falls or joint overload
- Contact misclassification directly impacts safety
Compute and Intelligence Hardware
Humanoids require heterogeneous compute to support perception, planning, and learning alongside real-time control. Unlike wheeled robots, humanoids must process rich sensory data while maintaining balance and coordination across dozens of actuators.
https://developer.nvidia.com/sites/default/files/akamai/embedded/images/jetson-orin-modules.png
{kind=link}
Image prompt (short)
“Block diagram of humanoid onboard compute showing CPU, GPU/NPU, real-time controllers, and interconnects, neutral schematic.”
Compute domains:
- High-performance inference (vision, language, planning)
- Real-time control processors
- Safety MCUs or isolated cores
Key parameters:
- Inference latency budgets: 10–50 ms
- Control loop deadlines: sub-millisecond to milliseconds
- Power envelopes tightly coupled to thermal limits
Architectural trade-offs:
- Centralized vs distributed compute
- Data locality vs wiring complexity
- Fault isolation vs performance
Real-Time Control and Motion Generation
This block converts intent into physically stable motion. In humanoids, control is responsible for balance, compliance, and graceful failure. No amount of intelligence compensates for unstable or delayed control at the joint and whole-body level.
https://upload.wikimedia.org/wikipedia/commons/6/6b/Humanoid_robot_balance_control_diagram.png
{kind=link}
Image prompt (short)
“Control architecture diagram for humanoid locomotion showing planners, whole-body control, and joint-level loops.”
Control layers:
- High-level motion planning
- Whole-body control and optimization
- Joint-level torque or position control
Key constraints:
- Deterministic timing
- Bounded outputs regardless of upstream AI behavior
- Direct coupling to safety systems
Failure modes:
- Timing jitter leading to instability
- Conflicting objectives between balance and task execution
Actuation and Mechanical Structure
Actuation defines what a humanoid can physically do. Strength, speed, compliance, and efficiency are determined here. Human-scale interaction demands actuators that are powerful yet safe, and structures that tolerate impacts and fatigue.
https://upload.wikimedia.org/wikipedia/commons/1/1c/Humanoid_robot_actuators.png
{kind=link}
Image prompt (short)
“Exploded view of humanoid joint showing motor, gearbox, sensors, and structural elements, engineering illustration.”
Actuator characteristics:
- Torque density
- Backdrivability and compliance
- Thermal limits and duty cycle
Structural considerations:
- Load paths through limbs and torso
- Fatigue under cyclic motion
- Maintainability and replacement access
Trade-offs:
- High torque vs efficiency
- Stiffness vs impact safety
- Weight distribution and balance
Power and Energy Management
Energy availability limits operating time, peak performance, and thermal behavior. In humanoids, power must be distributed safely through a moving, articulated body while supporting high transient loads.
https://upload.wikimedia.org/wikipedia/commons/4/4e/Robot_battery_pack_diagram.png
{kind=link}
Image prompt (short)
“Humanoid power system diagram showing battery pack, power distribution, and major loads.”
Key elements:
- Battery chemistry and packaging
- High-current distribution
- Regeneration during motion
Constraints:
- Energy density vs safety
- Thermal coupling to compute and actuators
- Degradation over lifecycle
Deployment impact:
- Runtime directly affects use-case viability
- Charging and service logistics dominate TCO
Communication and Internal Networking
A humanoid is a distributed system. Reliable, deterministic communication is required to coordinate sensing, control, and safety across the body. Latency and synchronization errors propagate quickly into instability.
https://upload.wikimedia.org/wikipedia/commons/9/9e/Robotic_network_architecture.png
{kind=link}
Image prompt (short)
“Internal network architecture of a humanoid robot showing fieldbuses, Ethernet, and time synchronization.”
Typical networks:
- Real-time fieldbuses for control
- High-bandwidth links for perception
- Redundant safety channels
Key concerns:
- Timing determinism
- Fault containment
- Scalability as DOF count increases
Safety, Monitoring, and Trust Infrastructure
Humanoids operate near people. Safety is not a feature but a governing system property. This block ensures that failures degrade gracefully and that unsafe actions are prevented or interrupted.
https://www.tuvsud.com/-/media/images/services/functional-safety/functional-safety-robotics.jpg
{kind=link}
Image prompt (short)
“Safety architecture diagram for a humanoid robot showing monitoring, emergency stop paths, and control overrides.”
Safety mechanisms:
- Redundant sensing and control paths
- Independent safety controllers
- Runtime monitors and interlocks
Certification drivers:
- Evidence of bounded behavior
- Clear fault detection and response
- Human–robot interaction limits
Software and Middleware Integration Layer
Software binds all functional blocks into a coherent system. In humanoids, software complexity scales rapidly with degrees of freedom and behavioral richness. Middleware choices determine debuggability, updateability, and long-term maintainability.
https://upload.wikimedia.org/wikipedia/commons/5/5d/ROS2_architecture.png
{kind=link}
Image prompt (short)
“Layered software stack for a humanoid robot showing middleware, control, AI, and hardware abstraction.”
Key responsibilities:
- Data transport and synchronization
- Hardware abstraction
- Logging and diagnostics
Lifecycle implications:
- OTA update support
- Reproducibility and traceability
- Separation of safety-critical and non-critical code
Concluding Synthesis
These functional blocks are inseparable in a humanoid Physical AI system. Weakness or mispartitioning in any block propagates across the system, often manifesting as instability, safety risk, or unmanageable lifecycle cost. The architectural challenge is not maximizing any single block, but balancing them under physical, regulatory, and economic constraints. Subsequent chapters will dive into each block in detail, but this decomposition provides the reference frame against which all humanoid system decisions should be evaluated.