From Classical Robotics to Physical AI
The transition from classical robotics to Physical AI represents a structural change in how intelligence, control, and uncertainty are handled inside robotic systems. Classical robots achieve reliability by limiting scope, enforcing determinism, and relying on explicit models. Physical AI systems expand capability by embedding learning-driven perception and decision layers, but in doing so they alter architectural boundaries, verification methods, and lifecycle risk profiles. The central challenge is not achieving intelligent behavior, but constraining it so that real-time control, safety, and certifiability remain intact. This chapter frames Physical AI as a hybrid systems problem where learning is powerful only when tightly bounded by physics, architecture, and evidence.
Context and Purpose
Classical robotics evolved around the assumption that the environment could be sufficiently modeled or constrained. Industrial arms, AGVs, and early service robots operate in spaces engineered to reduce uncertainty. Physical AI systems invert this assumption by accepting environmental variability and partial observability as first-order conditions. The purpose of this chapter is to make explicit how this shift propagates through system design. It clarifies what changes at the level of sensing, control, compute, and validation, and what must remain unchanged for a robot to be deployable outside controlled settings.
Requirements and Constraints That Do Not Disappear
Despite new capabilities, Physical AI robots remain bound by the same physical and regulatory constraints as classical systems. Joint-level control loops still operate at hundreds to thousands of hertz. End-to-end latency from sensing to actuation remains tightly budgeted, often below tens of milliseconds for dynamic tasks. Power, thermal dissipation, mass, and mechanical wear impose hard ceilings on compute and sensing density. Safety integrity levels define acceptable failure probabilities regardless of whether a behavior is learned or programmed. Any system architecture that treats learning as a way to bypass these constraints fails at deployment.
Model-Centric Versus Data-Centric Intelligence
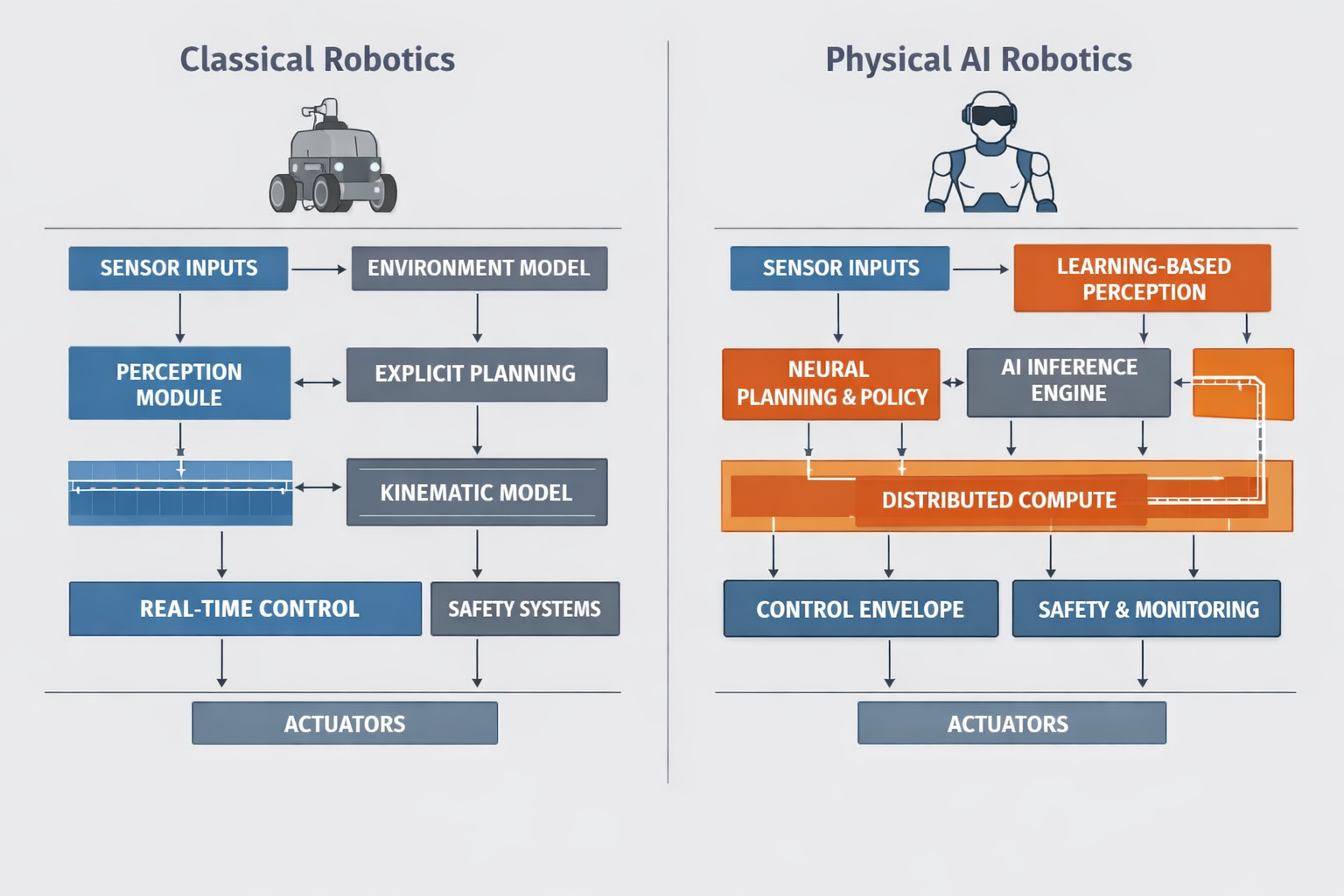
Classical robots derive behavior from explicit models: kinematics, dynamics, contact mechanics, and predefined task graphs. Uncertainty is handled through margins, calibration, and conservative control gains. Physical AI systems replace large portions of explicit perception and decision modeling with learned inference. Object recognition, scene understanding, and high-level action selection become probabilistic outputs rather than deterministic computations. Crucially, this shift is asymmetric. Learning excels where modeling is brittle, such as visual perception, but performs poorly where hard guarantees are required. Effective systems therefore remain model-centric at the physical interface and data-centric above it, forming a layered hybrid rather than an end-to-end learned stack.
Architectural Repartitioning of the Robot
The introduction of Physical AI forces a repartitioning of system architecture. Classical robots often centralize compute around deterministic controllers with limited acceleration. Physical AI robots introduce heterogeneous compute domains, including GPUs or NPUs for perception and inference, operating alongside real-time CPUs and motor controllers. These domains differ in timing determinism, fault tolerance, and power behavior. As a result, system architects must explicitly define boundaries between inference paths and control paths. Data may flow asynchronously through perception and planning layers, but actuation commands must cross well-defined interfaces that enforce timing, magnitude, and safety constraints.
Control Envelopes and Hybrid Responsibility
A defining feature of deployable Physical AI systems is the control envelope. Learned components may propose actions, trajectories, or goals, but execution is mediated by deterministic controllers that enforce physical and safety constraints. These envelopes include joint limits, velocity and force bounds, collision avoidance constraints, and fallback behaviors. Responsibility is split: learning provides adaptability, while classical control guarantees bounded behavior. Systems that blur this boundary struggle to pass safety reviews because accountability for failure becomes undefined.
Verification and Validation Under Uncertainty
Verification strategies diverge sharply between classical and Physical AI systems. Classical robots rely on exhaustive analysis of known behaviors and worst-case scenarios. Physical AI introduces behavior that is not fully enumerable. Validation therefore becomes statistical and scenario-driven. Performance is characterized through coverage of operating conditions rather than completeness of specification. This requires simulation at scale, structured real-world testing, and continuous monitoring after deployment. Importantly, validation evidence must be accumulated and curated over the system’s lifetime. Physical AI systems that cannot explain how their behavior was validated are effectively undeployable, regardless of lab performance.
Concrete Failure Modes Introduced by Physical AI
Physical AI introduces failure modes that are rare or nonexistent in classical systems. Perception systems may misclassify novel objects with high confidence. Learned policies may degrade silently under environmental drift. Decision layers may exhibit brittle behavior outside their training distribution. These failures often do not manifest as crashes or faults, but as plausible yet unsafe actions. Detecting them requires explicit confidence estimation, redundancy across sensing modalities, and runtime monitors that compare inferred state against physically plausible bounds. Diagnostics must be designed as part of the system, not added post hoc.
Comparative Trade-Space
| Dimension | Classical Robotics | Physical AI Robotics |
|---|---|---|
| Primary intelligence | Explicit models | Learned inference |
| Determinism | High | Partial, bounded |
| Verification method | Analytical + bounded tests | Statistical + scenario-based |
| Compute profile | Predictable, low burst | Heterogeneous, bursty |
| Failure observability | Clear fault signatures | Often silent or probabilistic |
| Update model | Infrequent, manual | Frequent, lifecycle-managed |
| Deployment friction | Low in constrained domains | High without evidence tooling |
This comparison highlights that Physical AI increases capability at the cost of architectural and organizational complexity. The trade is rarely neutral.
Implications for Real-World Deployment
From a deployment perspective, Physical AI raises the bar. Safety cases must justify adaptive behavior. Update mechanisms must allow rollback and audit. Data collected in the field becomes both an asset and a liability, requiring governance and security controls. Organizations that succeed treat Physical AI robots as evolving systems with managed risk, not static machines. Those that fail often discover that intelligence without discipline increases operational risk faster than it increases value.
Long-Term System Trajectory
The trajectory from classical robotics to Physical AI is not toward fully learned machines, but toward better partitioned hybrids. Progress will come from clearer architectural boundaries, improved validation tooling, and tighter integration between simulation and real-world evidence. Advances that reduce uncertainty in verification and lifecycle management will matter more than marginal gains in model accuracy. Physical AI will mature when its systems become predictable to engineers, regulators, and operators alike.
Glossary
Control envelope
A deterministic layer that constrains learned or high-level behaviors within safe physical and operational bounds.
Hybrid system
A system combining model-based control with learning-based perception or decision components.
Inference latency
Time from sensor input to usable output from a learned model, often variable and hardware-dependent.
Silent failure
A failure mode where system output appears plausible but violates safety or performance expectations.
Scenario-based validation
Testing methodology that evaluates performance across a structured set of representative operating conditions rather than exhaustive enumeration.
Sources and References
Springer Handbook of Robotics
Bruno Siciliano, Oussama Khatib (eds.)
https://link.springer.com/book/10.1007/978-3-540-30301-5
Accessed: 2026-01-31
Safe and Reliable Learning in Robotics
IEEE Robotics and Automation Magazine
IEEE
https://ieeexplore.ieee.org/document/8463180
Accessed: 2026-01-31
Autonomy Safety: Research and Measurement
National Institute of Standards and Technology
https://www.nist.gov/programs-projects/autonomy-safety
Accessed: 2026-01-31