The strategic standardization map for Physical AI
Humanoid robotics is entering the same industrialization phase once seen in automotive and aviation: innovation alone is no longer enough.
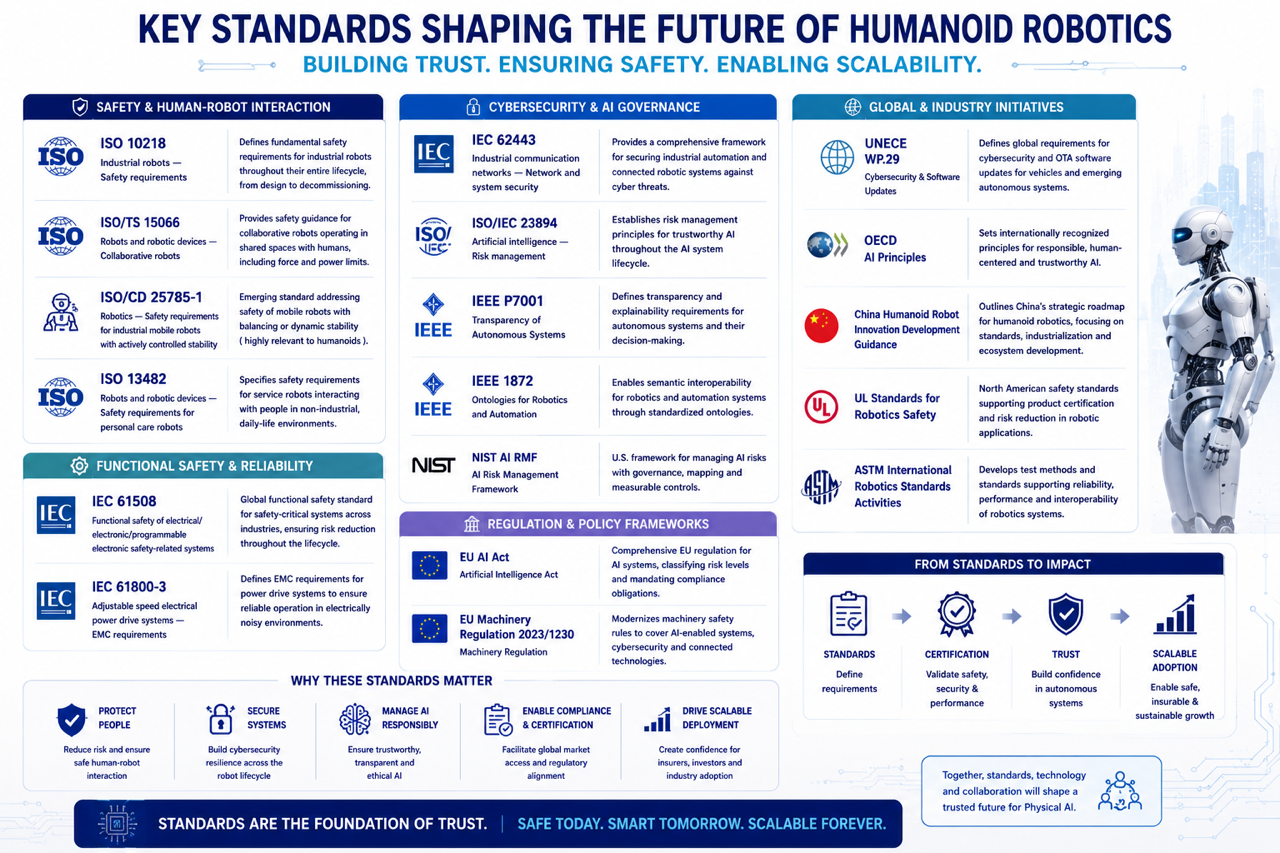
Standards such as ISO 10218, ISO/TS 15066, IEC 61508, IEC 62443 and emerging humanoid-focused frameworks will define how Physical AI becomes scalable, certifiable and insurable.
The next competitive advantage is trusted deployment.
That is where semiconductors become foundational. Safe motion control, secure edge AI, cybersecurity, sensing redundancy, EMC robustness and deterministic real-time control all originate at the silicon layer.
Key existing anchor points are ISO 10218, ISO 13482, ISO/TS 15066, ISO 13849, IEC 61508, IEC 61800-3, IEC 62443, ISO/IEC 23894, IEEE 1872/P7007, and the emerging ISO 25785-1 for actively controlled stability robots. The strongest missing category is a dedicated humanoid/legged/self-balancing safety framework, which ISO 25785-1 now begins to address.
The strategic standardization map for Physical AI humanoids should be structured in nine layers:
- robot safety
- collaborative operation
- actively balanced mobility
- functional safety
- electrical and EMC safety
- cybersecurity
- AI governance
- human interaction/ethics
- market access/regional regulation

The semiconductor-relevant standard pressure points are clear: safe torque off, safe motion monitoring, redundant sensing, joint-level current/torque monitoring, motor-drive EMC, battery and power safety, secure boot/update, edge-AI reliability, and verifiable fail-safe behavior.
| Standard / activity | Status | Relevance to humanoids, cobots, arms | Source |
| ISO 10218-1/-2:2025 | Published | Core industrial robot and robot-system safety; now more important for collaborative applications and robot cells. | https://www.iso.org/standard/73933.html |
| ANSI/A3 R15.06-2025 | Published | US adoption of ISO 10218-1/-2:2025 plus robot-cell user guidance. | https://webstore.ansi.org/standards/ria/ansia3r15062025partspart |
| ISO/TS 15066 | Existing, partly absorbed into ISO 10218-2:2025 | Force, pressure and collaborative operation guidance for cobots and human-shared workspaces. | https://www.tuv.com/landingpage/en/robotics/main/standards-and-services/ |
| ISO 13482 / ISO/FDIS 13482 | Revision active | Service/personal-care robot safety; relevant for humanoids outside fenced industrial zones. | https://www.iso.org/standard/83498.html |
| ISO/CD 25785-1 | Emerging | Most important new humanoid-adjacent standard: industrial mobile robots with actively controlled stability, including legged/bipedal robots. | https://www.iso.org/standard/91469.html |
| ISO 13849-1 | Existing | Safety-related control systems, performance levels, safe motion functions. | https://www.iso.org/ |
| IEC 61508 | Existing | Base functional-safety framework for E/E/PE systems; important for semiconductors, drives, sensors and controllers. | https://www.iec.ch/ |
| IEC 61800-3 | Existing | EMC for power drive systems; critical for dense multi-axis humanoid actuation. | https://webstore.iec.ch/publication/276 |
| IEC 60204-1 | Existing | Electrical equipment of machines; grounding, protection, emergency stop, wiring. | https://www.iec.ch/ |
| IEC 62443 | Existing | Industrial cybersecurity; relevant for connected robots, fleets, OTA updates and factory integration. | https://www.iec.ch/ |
| ISO/IEC 27001 | Existing | Information-security management; useful for fleet data, service operation and enterprise deployment. | https://www.iso.org/ |
| ISO/IEC 23894 | Existing | AI risk management; relevant for perception, planning, autonomy and embodied AI. | https://www.iso.org/ |
| EU Machinery Regulation 2023/1230 | Applies from 2027 | Adds stronger treatment of AI, cybersecurity, software updates and connected machinery. | https://osha.europa.eu/en/legislation/directive/regulation-20231230eu-machinery |
| EU AI Act harmonised standards | In development | Defines conformity path for high-risk AI, transparency, human oversight, robustness, cybersecurity and quality systems. | https://digital-strategy.ec.europa.eu/en/policies/ai-act-standardisation |
| IEEE 1872 / P1872.2 | Existing / active | Robotics ontologies for interoperability, task representation and autonomous robotics semantics. | https://www.ieee-ras.org/industry-activities/standards/existing-projects/ |
| IEEE P7001 / P7007 / P7009 | Ethics-oriented IEEE activities | Transparency, ethically driven robotics ontologies and fail-safe autonomous systems. | https://standards.ieee.org/wp-content/uploads/import/documents/other/ais.pdf |
| China humanoid robot standard system | Active national push | Six-pillar framework: foundations, intelligent computing, limbs/components, integration, applications, safety/ethics. | https://english.news.cn/20260303/0e51ac8f66c542c5bacf2af3f80b3a40/c.html |
| China first humanoid robot national standards | Approved for development | Covers perception, decision-making/planning, motion control and task execution. | https://english.beijing.gov.cn/beijinginfo/sci/event/202504/t20250424_4073087.html |
| Japan JIS B 8445 / B 8446 | Existing | Japanese service/living-support robot safety standards aligned with ISO 13482 plus domestic extensions. | https://www.jet.or.jp/en/products/robot/index.html |
| Japan ISO 31101 service robot operation | Published | Safe operation management for service robot providers. | https://www.meti.go.jp/english/press/2023/1113_001.html |
| Korea Intelligent Robots Act | Existing / evolving | Robot promotion, safety certification, insurance, sidewalk robot operation, robot ethics charter. | https://elaw.klri.re.kr/eng_mobile/viewer.do?hseq=39153&key=13&type=sogan |
| India BIS LITD 30 / ISO IEC JTC 1 SC 42 | Active | AI and big-data standardization; India increasingly participates in global AI standards. | https://www.pib.gov.in/PressReleaseIframePage.aspx?PRID=2120521 |
Source notes: ISO confirms ISO/CD 25785-1 specifically covers industrial mobile robots with actively controlled stability, including legged, bipedal and wheeled balancing robots. ISO 10218 was updated in 2025 and remains the core industrial robot safety baseline. The EU Machinery Regulation introduces stronger requirements around AI, cybersecurity, human-robot collaboration, connected devices and software updates. China’s humanoid standards system is unusually strategic because it directly targets humanoid-specific modules, interfaces, computing, applications, safety and ethics.
Market-defining quasi-standards to monitor: NVIDIA Isaac/GR00T for robotics AI stacks, ROS 2 as middleware baseline, EtherCAT/CAN FD as motion-network defaults, Unitree and China supply-chain interfaces in low-cost humanoids, Boston Dynamics/Agility practices around dynamic stability safety, and automotive-derived safety/security practices from ISO 26262, ASPICE, AUTOSAR and UNECE R155/R156 moving into robotics.