From Zero to Robotics Systems Engineer in 6 Months
Robotics learning is scaling faster than robotics talent
📊 Market
Access to robotics education has expanded rapidly through open courses from leading institutions. Platforms from Stanford University, Massachusetts Institute of Technology, and ETH Zürich provide structured, high-quality content at global scale (https://see.stanford.edu/Course/CS223A)
⚙️ Technology
Robotics capability emerges from the interaction of perception, compute, actuation, and power. Recent curricula increasingly reflect this system view, integrating AI, control, and embedded systems (https://underactuated.csail.mit.edu/)
🏭 Industry
Industrial deployment highlights a consistent gap between algorithmic knowledge and system integration. Real-world performance depends on efficiency, real-time behavior, and hardware-software co-design (https://developer.nvidia.com/isaac-sim)
🔍 Implication
Learning pathways are converging toward system-level understanding. This aligns with the requirements of Physical AI and scalable robotics.
🧭 Free Robotics Learning Stack (Subsystem-Mapped)
🧭 Foundation
Linear Algebra (Khan Academy) / Compute / ¢0
Builds mathematical intuition for vectors, transformations, and matrices, enabling understanding of kinematics, SLAM, and machine learning models in robotics systems.
https://www.khanacademy.org/math/linear-algebra
Python for Scientific Computing (freeCodeCamp) / Compute / ¢0
Provides practical programming skills for simulation, data handling, and AI workflows, forming the backbone of modern robotics software development and experimentation.
https://www.freecodecamp.org/learn/scientific-computing-with-python/
🤖 Beginner
Stanford CS223A Introduction to Robotics / Actuation Control / ¢0
Covers kinematics, dynamics, and motion planning, establishing foundational understanding of how robots move, interact, and execute controlled physical tasks in structured environments.
https://see.stanford.edu/Course/CS223A
Modern Robotics Northwestern / Actuation Compute / ¢0
Introduces a unified mathematical framework using twists and screw theory, enabling precise modeling and control of robotic manipulators and complex motion systems.
https://modernrobotics.northwestern.edu/learn-robotics/
ETH Autonomous Mobile Robots / Perception Compute / ¢0
Focuses on localization, mapping, and navigation, providing essential knowledge to design robots that perceive environments and operate autonomously in dynamic real-world scenarios.
https://www.edx.org/learn/robotics/eth-zurich-autonomous-mobile-robots
🔧 Practical Systems
ROS2 Basics The Construct / Compute Systems / ¢0
Introduces ROS2 middleware for integrating sensors, control, and computation, enabling modular development and communication across distributed robotic system architectures in practice.
🧠 Intermediate
MIT Robotic Manipulation / Actuation Perception / ¢0
Explores grasping, contact dynamics, and planning, teaching how robots physically interact with objects under uncertainty in real-world manipulation and automation scenarios.
https://manipulation.csail.mit.edu/
MIT Underactuated Robotics / Actuation Control / ¢0
Focuses on systems with fewer actuators than degrees of freedom, highlighting real-world constraints, stability, and control challenges in dynamic and efficient robotic systems.
https://underactuated.csail.mit.edu/
DeepRob University of Michigan / Perception Compute / ¢0
Covers deep learning methods for vision and perception, enabling robots to interpret sensor data and make decisions in unstructured and complex environments.
https://deeprob.org/
⚙️ Advanced
CMU Optimal Control / Actuation Compute / ¢0
Teaches trajectory optimization and model predictive control, enabling efficient and high-performance motion planning for complex robotic systems operating under constraints.
https://optimalcontrol.ri.cmu.edu/
CMU Robot Dynamics / Actuation / ¢0
Provides deep understanding of multi-body dynamics and physical modeling, critical for designing stable, accurate, and responsive robotic systems in industrial and humanoid applications.
Berkeley CS287 Deep Reinforcement Learning / Compute Perception / ¢0
Explores reinforcement learning techniques for robotics, enabling adaptive behavior and decision-making through interaction with environments and data-driven policy optimization.
https://rail.eecs.berkeley.edu/deeprlcourse/
🏭 Systems and Deployment
Embedded Systems UT Austin / Compute Power / ¢0
Covers real-time embedded programming and hardware interaction, essential for implementing control algorithms and ensuring deterministic performance in physical robotic systems.
https://www.edx.org/learn/embedded-systems/the-university-of-texas-at-austin-embedded-systems-shape-the-world
Control of Mobile Robots Georgia Tech / Actuation Control / ¢0
Applies control theory to mobile platforms, bridging theoretical models and practical implementation for stable navigation and motion control in robotic applications.
https://www.coursera.org/learn/control-of-mobile-robots
🚀 Cutting Edge
IEEE RAS University / System Level / ¢0
Provides structured robotics education across perception and control, reflecting emerging standards and offering a comprehensive system-level understanding aligned with industry evolution.
https://www.ieee-ras.org/education/ras-university
NVIDIA Isaac Sim / Compute Perception / ¢0
Enables simulation and digital twin development, allowing scalable testing, validation, and deployment of robotic systems before real-world implementation and integration.
https://developer.nvidia.com/isaac-sim
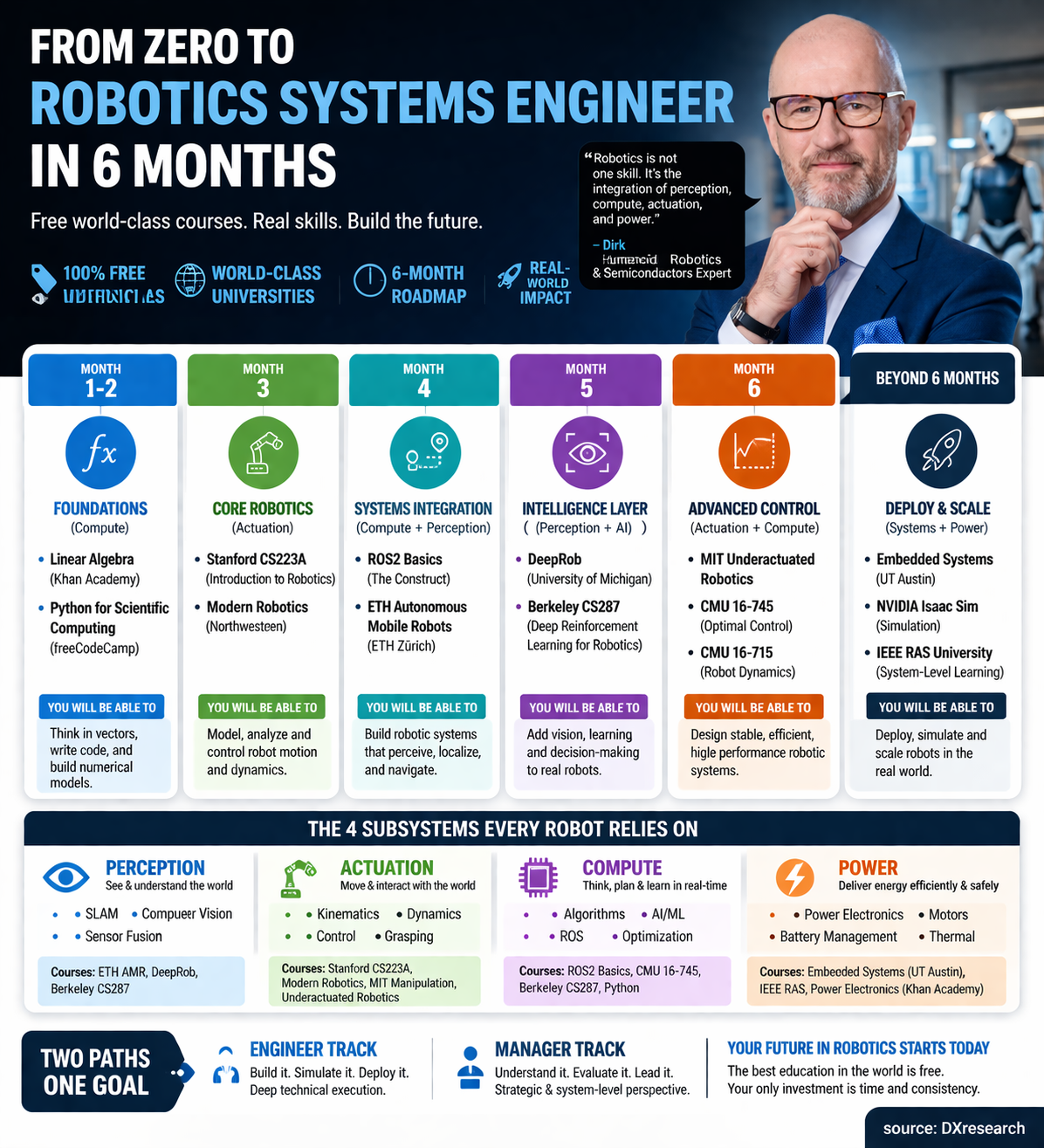
⚡ 6-Month Fast-Track Plan (Engineer Track)
Goal: From fundamentals → deployable robotics understanding
Month 1–2: Foundations (Compute + Math)
- Linear Algebra (Khan Academy)
- Python (freeCodeCamp)
👉 Output: ability to simulate and compute transformations
Month 3: Core Robotics (Actuation + Modeling)
- Stanford CS223A
- Modern Robotics
👉 Output: understand robot motion, kinematics, dynamics
Month 4: Systems + Middleware
- ROS2 Basics
- ETH Autonomous Mobile Robots
👉 Output: build and simulate a full robot pipeline
Month 5: Intelligence Layer
- DeepRob
- Intro modules from Berkeley CS287
👉 Output: perception + learning-enabled robotics
Month 6: Advanced Control + Integration
- MIT Underactuated Robotics
- CMU Optimal Control
👉 Output: design stable, efficient, real-world systems
Optional parallel track (highly recommended)
- NVIDIA Isaac Sim (start Month 4 onward)
Alternative: Manager Track (Compressed)
Focus on understanding, not implementation:
- ETH AMR (systems overview)
- MIT Manipulation (applications)
- DeepRob (AI impact)
- IEEE RAS University (structured overview)
👉 Outcome: ability to evaluate vendors, architectures, and trends